2025年9月28日至29日,在william威廉中文国际交流处的大力支持下,威廉williamhill成功在梧桐语问学中心主办了“喻园家·交通系统分析与建模国际研讨会”。本次会议聚焦交通系统分析、机器学习在交通建模中的应用、自动驾驶技术以及行人行为仿真等前沿领域,汇聚了来自澳大利亚莫纳什大学、美国亚利桑那州立大学、北京交通大学、东南大学、长安大学、西交利物浦大学、西北工业大学、天津大学、北京工业大学、中南大学及william威廉中文等多所高校的知名学者,展开深度学术交流。

会议开幕式上,威廉williamhill院长刘华北教授致欢迎辞。他对各位嘉宾的到来表示热烈欢迎,强调了学院在推动交通学科发展和促进国际学术交流方面的持续努力。刘院长指出,良好的学术环境和制度保障是科研进步的重要基础,学院始终高度重视学科建设与学术交流。会议由交通运输工程系主任邹志云教授主持。

在为期一天半的研讨过程中,来自国内外的专家学者分享了最新研究成果。澳大利亚莫纳什大学交通工程系主任、《Transportation Research Part C》客座编辑Dong Ngoduy教授以《Adaptive Machine Learning for Real-Time Microscopic Traffic Simulation Under Disruptions: From Theory to Deployment》为题,做了开幕报告,系统介绍了自适应机器学习在扰动环境下实时交通仿真中的应用。

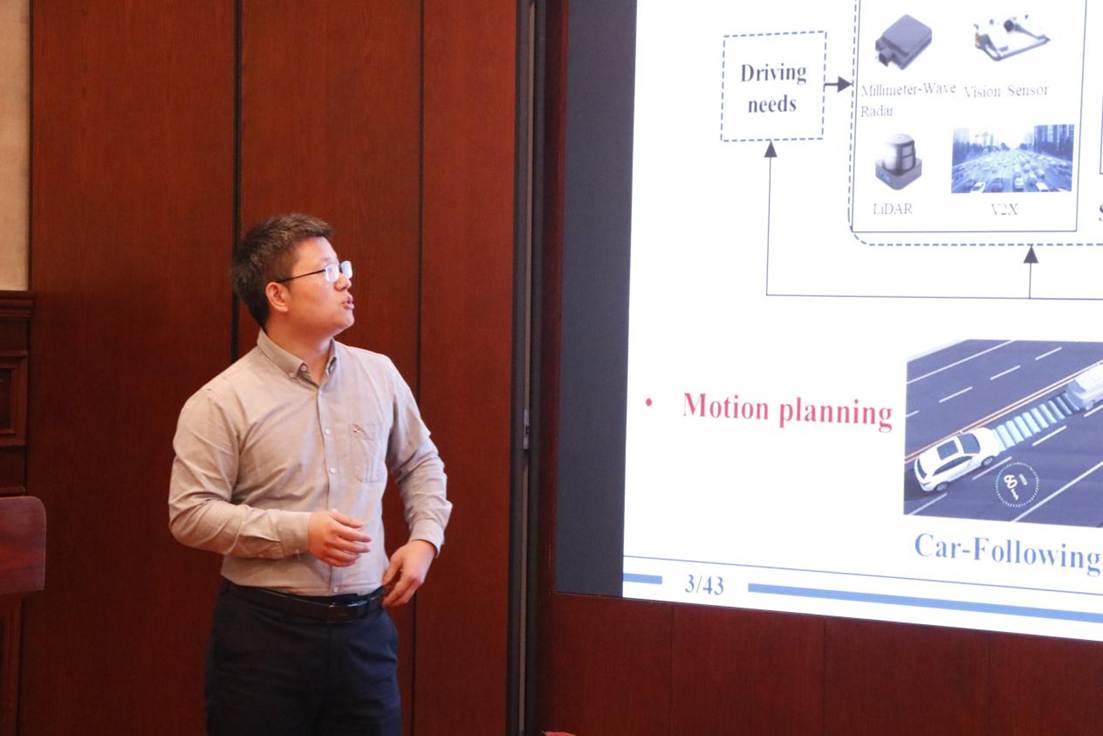
随后,长安大学龚思远教授以《A Dynamic Differentiated Car-following Guidance System by a Machine Learning-based Human Factor-in-loop Control with Field Tests》为题,展示了基于人因环路控制的动态差异化跟驰诱导系统及其场地实测成果。

西交利物浦大学贾东耀副教授围绕《Knowledge-Informed Deep Learning Design for Traffic Modelling and Prediction》,探讨了知识引导深度学习在交通建模与预测中的创新设计。

与此同时,西北工业大学陈建忠副教授以《Research on Vehicle Platoon Control Based on Deep Reinforcement Learning》为题,探讨了基于深度强化学习的车辆队列控制方法。

我校徐学才副教授发表题为《Addressing Pedestrian Injury Risk with Density Peak Clustering and Familiar Bayesian Spatiotemporal Epidemiological Modelling》的报告,聚焦行人伤害风险的建模与分析方法。

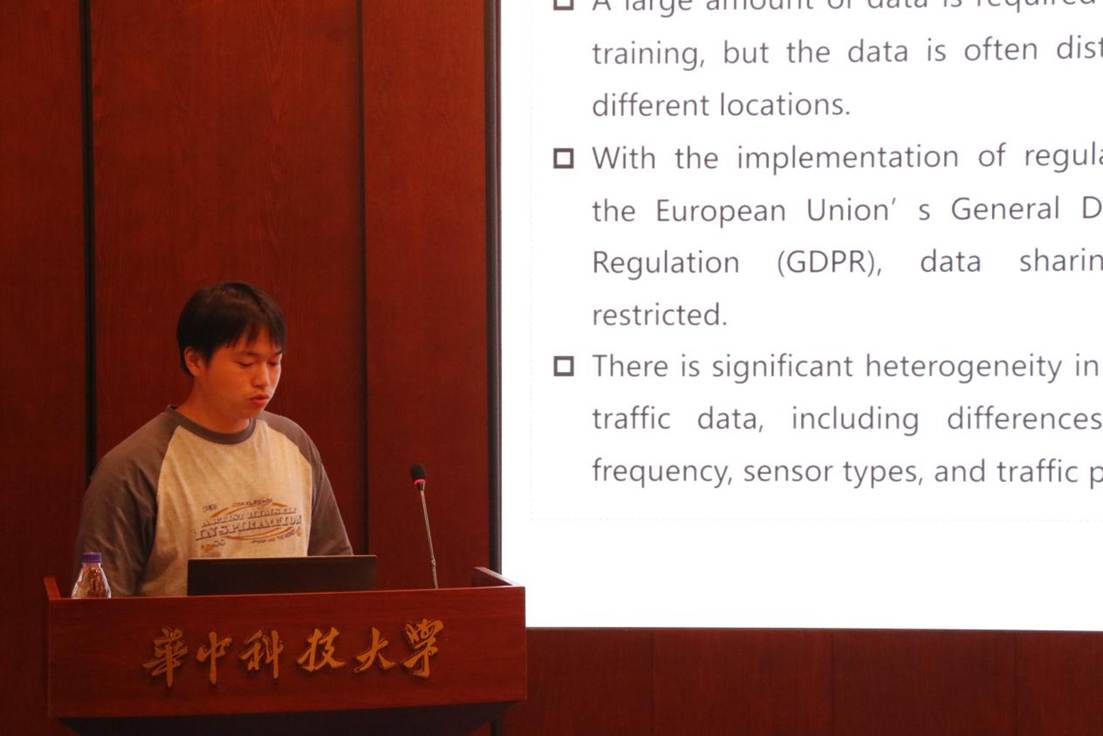
中南大学戴国文博士以《A Spatiotemporal Collaborative Federated Learning Framework and Game Incentive Mechanism for Traffic Flow Prediction》为题,探讨了面向交通流预测的时空协同联邦学习框架及激励机制。
9月29日上午,教育部长江学者、国家杰青、我校李志纯教授以《Research Progress in Transportation Operations》为题,梳理并展望了交通运营管理领域的最新研究方向。
教育部长江学者、北京交通大学姜锐教授围绕《Mixed Traffic of Human Driven and Automated Vehicles: Experimental Study and Simulation》,系统分析了人驾与自动驾驶混合交通流的实验与模拟进展。

东南大学王建教授发表《Cooperative Control of Autonomous Vehicles》报告,深入探讨了自动驾驶车辆协同控制的关键问题与方法。
美国交通研究委员会交通网络分析分委会主席、《Transportation Research Part B》编委、亚利桑那州立大学周学松教授在线参加会议,并以《Low-Rank Convex Optimization for Scalable Traffic Assignment》为题,揭示了路径-链路矩阵的内在谱冗余特性,将传统路径空间优化问题转化为低维凸优化,突破了混合交通流模型中路径数量随网络规模指数增长的计算瓶颈。

以及校友国家优青、天津大学田钧方教授以《On the Calibration of Stochastic Car Following Models》为题,阐述了随机跟驰模型的标定理论与实证分析。

校友东京大学博士、北京工业大学贾晓璐老师围绕《Navigating the Obstacle: Pedestrian Experiments, Simulations, and Empirical Management at a Railway Station》,展示了轨道交通车站内行人流诱导的实验、仿真与实测研究成果。

本次研讨会不仅展示了交通系统分析与建模领域的最新研究进展,也为国内外学者搭建了高水平的学术交流平台。此次会议对推动智能交通系统理论创新与实践应用具有重要推动作用,进一步促进了交通学科的国际合作与发展。
通讯员 张紫月
